 Overview of our method.
Overview of our method.
Abstract
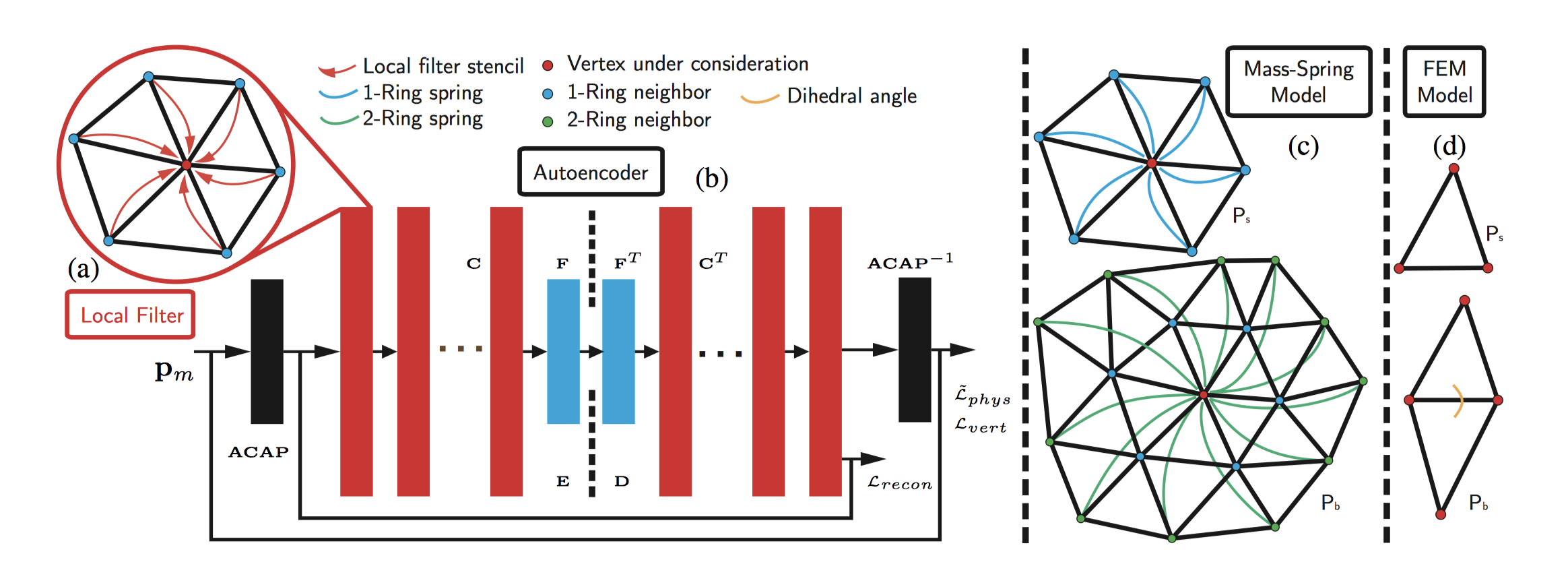
We address the problem of accelerating thin-shell deformable object simulations by dimension reduction. We present a new algorithm to embed a high-dimensional configuration space of deformable objects in a low-dimensional feature space, where the configurations of objects and feature points have approximate one-to-one mapping. Our key technique is a graph-based convolutional neural network (CNN) defined on meshes with arbitrary topologies and a new mesh embedding approach based on physics-inspired loss term. We have applied our approach to accelerate high-resolution thin shell simulations corresponding to cloth-like materials, where the configuration space has tens of thousands of degrees of freedom. We show that our physics-inspired embedding approach leads to higher accuracy compared with prior mesh embedding methods. Finally, we show that the temporal evolution of the mesh in the feature space can also be learned using a recurrent neural network (RNN) leading to fully learnable physics simulators. After training our learned simulator runs $500-10000\times$ faster and the accuracy is high enough for robot manipulation tasks.
Qingyang Tan
Ph.D. Candidate
My research interests include computer graphics, physical simulation, geometry processing,, computer vision, and machine learning.